|
定位联锁机构 |
||
|
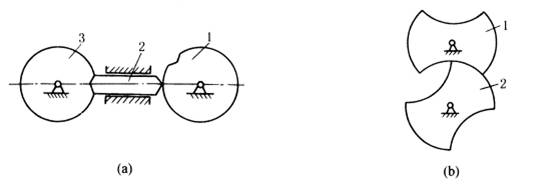
图(1)中,定位销2由弹簧使其进入转动件1的定位槽孔,而利用凸轮3使其退出。为防止定位销自动滑出定位槽,其楔角应满足自锁条件,即α应小于摩擦角,一般α=5°~7°。 图(2)中,转盘3逆时针方向转位时,由于斜面的作用,将定位销1由定位槽A中推出,而定位销2由凸轮4或其他机构控制使之由定位槽B中退出。转盘转位后,定位销1在弹簧作用下插入定位槽A',这时,另一定位销2在弹簧作用下插入相应的定位槽B'。双销定位比单销定位磨损小,精度高。 |
||
|
图(1)单销定位装置 |
图(2)双销定位装置 |
|
|
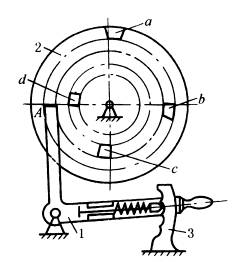
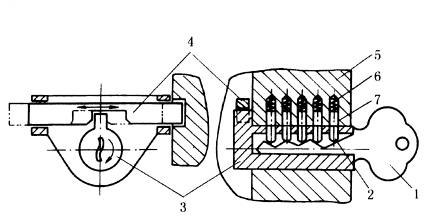
图(3)中,在件2的不同半径的圆周上,设置有挡块a、b、c、d,转动杠杆1,使1上的A端处于不同半径的圆周上,则相应圆周上的挡块与A接触时盘2被定在这位置上。 图(4)中,钥匙1使上排弹子7和下排弹子2刚好接触在3、5的分界面上,此时1可转动,并带动3转动,3的凸块拨动销子4,将它插入门框体5的孔中。如将1拨出,则弹子2、7一起下落,7将卡入3、5的分界面中阻止3转动,这样,就将4锁住。 |
||
|
图(3)可调定位器 |
图(4)弹子锁结构 |
|
|
图(5)a中,轴1、2互相联锁,移动其中一根轴,则另一根轴被锁住。如先移动轴2,则2将钢球4向上推入轴1的凹槽中(图b),这时,轴1被锁住不能动,反之,轴1先移动时可将轴2锁住。 图(6)a中,1、2、3三根轴只能先移动一根,如先移动轴3,则将钢球4推入1、2的槽中。图b表示1、2被锁住位置。 |
||
|
图(5)两轴移动联锁装置 |
图(6)三轴移动联锁装置 |
|
|
下图a,轮1的圆弧面将锁杆2推入3的凹槽中时,轮1可转动,轮3被锁住,只有1的凹口对着锁杆2时,轮3才能转动,这时锁杆2推入轮1的凹口中,将1锁住。 图b,一轮的凹弧与另一轮的凸弧相对时,凸弧的轮可以转动,而凹弧的轮被锁住,如图示为轮1被锁住。 |
||
|
两转动轴的联锁 |
||
|
图(7)中,具有凹槽的定位盘5、7大小相同。齿轮1、2、3、4的齿数分别为z1=50,z2=150,z3=50,z4=50。初始位置时,两盘槽口对准,定位齿6插入两盘的槽中定位,拔出定位齿后,定位盘7开始转动,若7转1转或2转,则5仅转1/3或2/3转,两盘的槽口仍相互错开,6不能入槽口定位,只有当7转3转时5才转一转使两盘槽口对准,定位齿又插入槽中定位,所以盘5还可起计数的作用。 万能分度头要扩大原有分度孔板的分度数目时,就可依上述原理使孔板与分度销盘间产生差速转动。 如图(8)所示,轮2被锁住,只有当轮1的凹口对着轮2时,才可能转动轮2,锁住轮1。 |
||
|
图(7)差速定位机构 |
图(8)两垂直交错轴联锁 |
|
|
齿盘结构如下图a所示,牙齿断面形状是齿顶交角为90°的三角形齿,齿槽沿圆盘径向布置。两个齿盘的结构相同,一个固定在机座上,一个固定在转位盘上,两齿盘保持同心,如图b所示,上定位齿盘2固定在转位工作台1上,下定位齿盘3固定在机座上,工作台1需转位时,首先通过锥齿轮13、14,偏心轴7,连杆和滑动轴4,使工作台1升高,使上、下定位齿盘脱离,然后,由齿轮机构11、10,四销四槽槽轮机构8、9和齿轮6、5驱动工作台1转位,转位停止时,转动偏心轴7,使工作台落下,上、下齿盘相互嵌合而定位。 齿盘式定位机构的定位刚度和精度均较好。若要有较高的定位精度和刚度,则齿盘要精加工,工作齿面要进行研磨,欲使适应多种分度角的变化,可采用多对齿盘组成“差动式”定位装置。 |
||
|
鼠齿盘定位机构 |
||
|
下图所示为工业机器人水平转动部件,可作任意角度转动,往返定位精度±4"(手臂长500mm时,顶端定位误差在±0.01mm)。该机构使用了由直流伺服电动机驱动的高精度蜗杆蜗轮副3、2,同时应用液压缸1保证其经常为零齿侧间隙。采用交错控制方式,装有索尼公司生产的高精度回转刻度盘MSE-3600。图中,4为回转刻度盘,5为检测头,6为角度表示装置的输出。 |
||
|
蜗轮和刻度盘组合转动定位机构 |
||