|
矢量图解法求解机构运动的步骤与方法 |
|||||
|
已知机构运动简图、主动件的位置φ1、角速度ω1(rad/s)及角加速度ε1(rad/s2),各构件的长度LAB、LBC 、…(m);求在指定的机构主动件位置时,连杆2上C点的速度υC 和加速度aC 以及杆2的角速度ω2和角加速度ε2 |
|||||
|
步 骤 |
方 法 与 数 值 |
||||
|
求 速 度 和 角 速 度 |
求 加 速 度 和 角 加 速 度 |
||||
|
1.选定长度比例尺μl,绘给定位置φ1时的机构运动简图 |
取 |
|
极点Pυ或Pa引出的线段为绝对运动矢量,连接其他任意二点的矢量为相对运动矢量 |
||
|
2.求主动件非连架运动副中心B的υB和aB |
方向⊥AB,其指向与ω一致 |
方向由B→A |
|||
|
3.由主动件出发向远离主动件方向依次取各构件为脱离体,利用运动分解成牵连运动和相对运动的原理列出相对运动矢量方程式,用作图法求解(每一矢量方程式可求解二个未知量大小或方向) |
(1)列C或D点的速度和加速度的矢量方程式 |
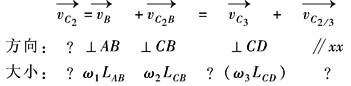
根据平面运动的构件两点间速度的关系: 绝对速度=牵连速度+相对速度 先列出构件2、3上瞬时重合点C2、C3的方程,未知数为三,不能解,故列出其上瞬时重合点D2(在2上扩充部分上)、D3间的速度方程:
方向: ⊥AB ⊥DB ∥xx 大小:0 ω1LAB ?(ω2LDB) ? |
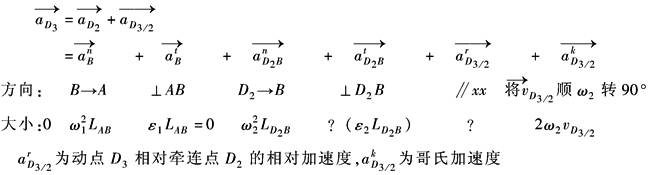
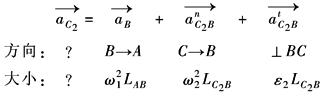
牵连运动为移动时: 绝对加速度=牵连加速度+相对加速度 牵连运动为转动时:牵连运动与相对运动互相影响 绝对加速度=牵连加速度+相对加速度+哥氏加速度
|
||
|
(2)定出速度、加速度比例尺 |
取Pυ为速度极点,取长Pυb表示
|
取Pa为加速度极点,取长Pab' 表示
|
|||
|
(3)作速度、加速度多边形,求ω2、ω3及ε2、ε3 |
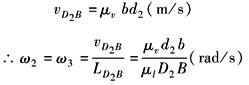
过b作bd2⊥BD,过Pυ作d3d2∥xx,d3d2与bd2交于d2,则
将代表 转动中心,可求得ω2为逆时针方向;构件2与3之间不得相对转动,故ω3亦为逆时针方向 |
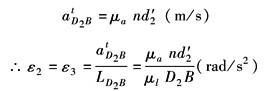
过b' 作
将代表 |
|||
|
(4)列C2点的速度和加速度矢量方程式,并作速度和加速度多边形,求
|
过b作bc2⊥BC,取bc2=ω2LCB/μυ,
过Pυ作Pυc3⊥DC,过c2作c2c3∥xx,Pυc3与c2c3相交于c3点,则
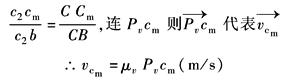
指向与ω3一致,亦可由 Δbc2d2~ΔBCD,且字母顺序一致,可将ΔBCD沿ω2方向转过90°而得,此谓速度影像原理 如已知构件上两点的速度,便可求其上任一点的速度,如BC上的Cm点,可使
|
过b' 作b'c2"∥BC,使 方向与ε2一致,则
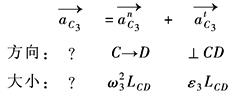
过Pa作Pac3"∥CD,指向由C到D,取 方向与ε3一致,则
Δb'c2'd2'~ΔBCD,字母顺序一致,可将ΔBCD沿ε2方向转过180°-θ而得, 速度影像原理。可用同样原理求解构件上任一点的加速度,如BC上的Cm点,可使
|
|||