|
导向驱动装置按运动结构形式及驱动方式分类 |
||
|
抓取和放置驱动抓取和放置驱动原应归类于气动机械手范畴,由于抓取和放置驱动在气动自动化领域中的应用越来越广泛,也越来越细分,随着大量、模块化带导轨驱动器的诞生,各国气动制造厂商纷纷开发符合抓取和放置驱动的自动化要求产品,根据它模块化、结构紧凑、组合方便等特征,已形成一个抓取和放置驱动体系。当然,它还能与其他普通气缸、导向驱动单元以及电缸等组成完美的自动化体系,本手册把它归类于导向驱动装置来叙述。该导向驱动装置主要用于抓放、分拣、托盘传送等自动流水线上,在中、小规模自动流水线上应用十分广泛。尤其适合结构紧凑、循环周期短、灵活、精度要求高的场合。随着工业化的不断发展,新产品、新技术将不断补充到气动机械手系统中,已出现的气驱动与电驱动混合模块化组合驱动系统将成为新的发展趋势。从运动结构形式上可分为抓放驱动、线性门架驱动、悬臂驱动三大类。该导向驱动装置在设计或选用上可根据工作负载、期望工作节拍、实际行程、是否需要中间定位(几个定位点)、位置定位精度及重复精度、现场环境(如多粉尘、局部高温、洁净等级高等)等参数进行选择 |
||
|
按运动形式分类 |
抓放 驱动 |
|
|
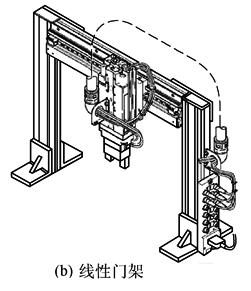
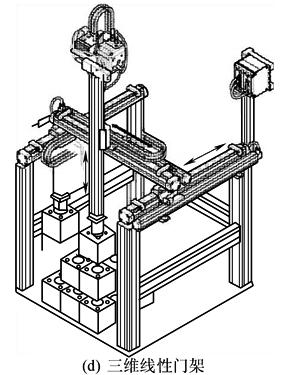
线性 门架 驱动 |
|
|
|
悬臂 驱动 |
|
|
|
按驱动方式分类 |
气驱 动(气 动轴) |
气驱动可以选择直线坐标气缸、无杆气缸、短行程滑块驱动器、高速抓取单元、齿轮齿条摆动气缸、气爪、吸盘及框架构件等元器件 |
|
电驱 动(电 动轴) |
电驱动可以选择电驱动轴(齿带式驱动轴或丝杠式驱动轴),它们分别可与步进马达、步进马达控制器、连接组件组合成一种方式,也可与伺服马达、伺服马达控制器、连接组件等组合成另一种方式 |
|
|
气驱 动/电 驱动 混合 形式 |
|
|
|
按控制方式分类 |
一般 气动 控制 |
|
|
气动 伺服 控制 |
气动伺服系统是气动任意位置定位的控制技术,从理论上讲,它可完成99个程序模式,512个中间停止(定位)位置,它的最高定位精度为±0.2mm |
|
|
气动 软停 止控 制 |
气动软停止控制是气动伺服控制机理下的一种派生定位控制,采用气动软停止控制形式,能使运动节拍提高20%~30%,并使被移动工件运动到终点时平稳、无冲击,某些气动制造厂商提供的气动软停止控制还可以有两次停止(定位精度±0.1~0.2mm) |
|
|
电控制 |
电驱动轴可分齿带和丝杠型两种结构,丝杠型电驱动轴重复定位精度高,为0.02mm,而齿带电驱动轴的重复精度一般为0.1mm(垂直方向重复精度为0.4mm) |
|