|
直线运动系统常见受载情况的计算 |
|||
|
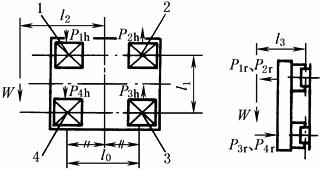
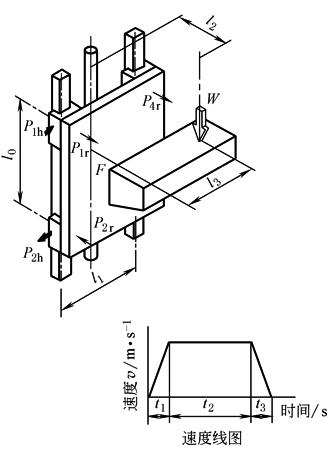
作用在导轨及滑块上的载荷,因工件重心的位置、驱动力F的位置及启动和停止时加、减速引起的惯性力及工作阻力等外力而变化。可以用空间力系六个平衡方程求解。下表给出了8种常见的二导轨四滑块直线运动系统各滑块所受载荷的计算式供参考。图中Pr为垂直于运动平面的反力,称径向反力;Ph为平行于运动平面的反力,称横向反力。 |
|||
|
使 用 条 件 |
作用在一个滑块上的载荷 |
应 用 |
|
|
1 |
等速运动或静止时
|
式中 W——外加载荷(W=mg,下同); P1r、P2r、…——垂直于运动平面的支反力 P1h、P2h、…——平行于运动平面且垂直于导轨的支反力,下同; F——驱动(推)力 |
二根立式导轨 匀速运动或静止时用左列公式计算。启动及停止时因惯性力引起的载荷变化参见本表8。常见于工业用立式机械手、自动喷涂机械、起重机等场合 |
|
2 |
等速运动或静止时
|
|
卧式导轨之一(四个滑块移动)�ぴ人倩蚓仓故钡奈允降脊�(滑块移动)用左列公式计算。直线运动且l2、l3变化时,平均载荷的计算(参见表常见的平均载荷(Pm)计算公式平均载荷部分),常见于工业用卧式机械手、自动压力机械、X-Y平台等 |
|
3 |
等速运动或静止时
|
|
卧式导轨之二(四个滑块移动),载荷W作用在工作台面外 匀速或静止时的卧式导轨(滑块移动)用左列公式计算,如工业用机械手、工厂运送机械、X-Y平台 |
|
4 |
等速运动或静止时
|
|
二根横梁导轨(四个滑块移动) 匀速运动或静止时的垂直导轨用左列公式计算,常见于交叉式轨道、工业用机械手、装货机等 |
|
5 |
等速运动或静止时
|
|
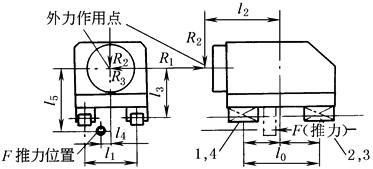
承受水平及垂直外力时的导轨 常见于钻孔机组、铣床、车床、机械加工中心等切削机械 |
|
6 |
等速运动或静止时
|
|
二根导轨移动时(行程2l1)的水平式导轨,四滑块支持,W作用台面中心 用于匀速运动时取平均载荷,常见于企业用机械手、X-Y平台 |
|
7 |
有加减速时
|
|
二根承受惯性力的水平式导轨,四滑块支持�ひ怨鲋樗扛芮�动居多 |
|
8 |
有加减速时
|
|
根承受惯性力的立式导轨,四滑块支持 |