|
图解计算法 |
||
|
解题步骤 |
方 法 及 数 值 |
|
|
1.作机构运动简图、求各构件的角加速度ε,及其重心的加速度a |
按表矢量图解法求解机构运动的步骤与方法,作图求ε及a
|
|
|
2.求各构件的惯性力Fg及其作用位置 |
按表构件惯性力的计算方法求得杆2、3上的Fg为:(杆1:为等速回转a=0,ε=0,Fg=0,Mg=0) 杆2: 杆3: |
|
|
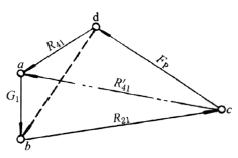
3.取脱离体,作示力图,列力的平衡方程式,求各运动副的反力 |
(1)将包括惯性力在内的全部外力加在构件上,如图d (2)将机构分成主动件1和构件组(本例为杆2、3),画出示力图,如图d、e (3)列出构件组的力平衡方程式,(为便于求解,法向反力
方向:∥BC ⊥BC √ √ √ √ √ ⊥AC 大小: ? ? √ √ √ √ √ ? 此方程的未知数超过2个,需求出
若求出的 (4)按构件组的力平衡方程式作为矢量多边形,如图f取力比例尺为 ∴ 列出构件2的力平衡方程式 也可由构件3求出 |
|
|
4.求机构的平衡力Fp |
(1)在图e上,取 R21=-R12 (2)列构件1的力平衡方程式 并作其力矢量多边形图g。求得R41=μpda,R41与G1的合力沿BA方向 当平衡力以力矩形式(MP=-R21h,FP=0)给出时,杆1处于 三力平衡状态:
|
|
|
已知机构的尺寸、原动件的转速n1r/min(角速度ω1=常数)、作用在输出构件(滑块)上的生产阻力Fz、各构件的重力G1、G2、G3及构件2的重心Cm2、它们的转动惯量JCm1、JCm2。求各运动副中的反力R12、R23、R34、R41和作用在B点并垂直于曲柄AB的平衡力Fp
|
||