|
HSP的结构形式及工作原理 |
||
|
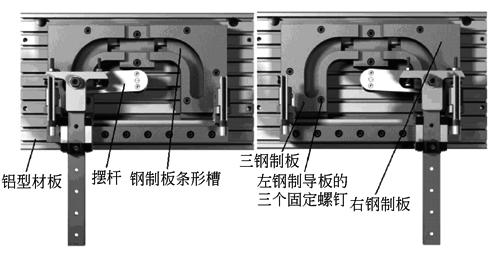
图1为抓取单元简单示意图,由一个气动旋转摆动驱动器DSM来完成从一端的Z轴、Y轴至另一端的Y轴、Z轴整个运动轨迹运动,气动旋转摆动驱动器在压缩空气的作用下,产生一个围绕旋转摆动主轴轴心线的半圆周旋转运动(从0°~220°角度范围内左右)。气动旋转摆动驱动器提供一个动力源,使摆杆1产生左右的 |
||
|
|
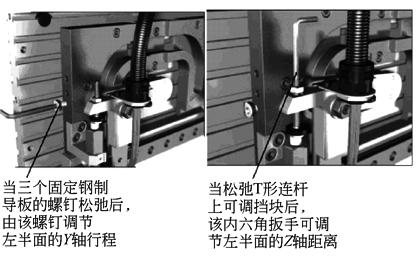
旋转摆动动作(见表概述中图1结构图),而它的一个运动轨迹则依靠抓放单元的机械导轨装置,它将一个圆周运动分解为Y轴方向的运动和Z轴方向的运动,还可对行程距离做出调整[在允许的条件:如左边Y轴(半径)与右边Y轴(半径)距离不一样,或左边的Z轴距离与右边的Z轴距离高低不一样]。图1为实际应用时其运动轨迹Y轴、Z轴的调整分解图。HSP高速抓放单元的T形连接杆上装有气爪或吸盘,它的运动由摆杆驱动,摆杆的运动轨迹由钢制导向板内的条形槽导向。详见图2,摆杆内有一个长键销形空槽,槽内配有滚轮。滚轮是轨迹运动的媒介,它的一部分圆柱面嵌入钢制导向板内条形槽的槽内,另一部分圆柱面则在摆杆长槽内。理论上滚轮的厚度等于摆杆厚度加上钢制导向板内条形槽的槽深,当滚轮在摆杆长槽内随摆杆旋转运动作径向滑动(做主动功能),真正引导滚轮作轨迹运动是钢制导向板内的条形槽,在钢制导向板内条形槽内滚轮随条形槽轨迹做从动功能,钢制导向板上的条形槽决定HSP模块在Y轴方向上的运动轨迹。分别调节对称的左右两块钢制导向板与HSP抓取模块中心(即DSM摆动驱动器2的旋转主轴中心线)之间的距离,就可以调节HSP模块在Y轴左右两边的行程距离。如调节Y轴左边方向的行程时,先松开左边钢制导向板上的三个螺钉,用内六角的扳手调节Y轴行程调节螺钉(见图2),使得钢制导向板向左移动(或向右),当确认Y轴所增加行程满足要求后,再拧紧三个螺钉便可完成。同样,Z轴垂直方向上的行程调节见图3 HSP终端位置的缓冲调节见表概述中图1,是通过与摆杆1直接相连接的T形连杆3、可调挡块 |
|
|
5和液压缓冲器YSRW6来共同完成的。为了克服T形连杆3在高速运动时产生的向外晃动(X轴方向)和惯量,将T形连杆3的下端与十字导轨4相连。T形连杆3最终可产生的运动冲击力仅在Y轴方向,当T形连杆3沿着十字导轨4运动到终端位置时,可由挡块8或液压缓冲器来实现 FESTO第一代高速抓取单元采用气动摆动驱动器提供驱动动力,第二代高速抓取单元采用电机提供驱动力HSP-AE伺服电机 |
||
|
图2 |
图3 |
|