|
用割断机架法确定单闭环空间机构的M |
||||
|
图 例 |
|
说明: 1.关键在于建立恰当的坐标系,利用虚位移原理写出末杆的运动方程式,写方程式时应就各运动副对末杆产生的运动影响逐个仔细地考查 2.本例中球副C的两个转动θCx、θCy、对机构的输出运动是不起作用的,仅用来补偿制造运动副A时所产生的转角误差,并增大承压面积 |
||
|
解 题 步 骤 |
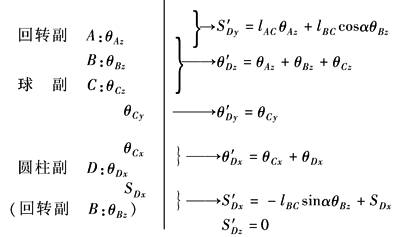
1.将图示机构的构件4割断,使4'与机架脱离而成为运动链的末杆,并取4'上任一点D(图中取得与C重合)为原点建立动坐标系,x'y'z' 2.研究末杆4'在开式运动链中可能实现的独立运动θ'Dx、θ'Dy、θ'Dz、S'Dx、S'Dy和S'Dz,它们是各运动副A、B、C、D所允许的独立运动θAz、θBz、θCz、θCy、θCx、θDx、SDx的合成结果,在研究某一运动副对末杆的影响时,暂时将其他运动副看成刚化的,据此列出运动方程组: |
|||
|
各运动副的独立运动 |
末杆4' 在各运动副影响下产生的运动及其方程 |
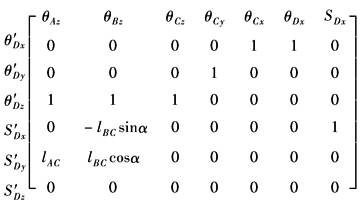
方程组的系数矩阵 |
||
|
|
|
|||
|
3.将末杆4' 再与机架固联,则上列方程组中各式均为零,为确定这些方程式中有几个是独立的,列出方程组的系数矩阵,求出系数矩阵的秩,则此秩就是上列方程组中独立方程的个数,也就是被割断的机架(末杆4' )的自由度(独立运动)数λ,图示机构的λ=5,表现为θ'Dx、θ'Dy、θ'Dz、S'Dx、S'Dy 4.割断机架后,4' 所不能实现的独立运动,必然是原机构中各运动构件中所共同失去的独立运动,或运动副共同得到的有效约束——公共约束,即M=6-λ,求得本机构的M=6-5=1 对所有机构 ∵2≤λ≤6 ∴0≤M≤4 考虑到圆柱副的独立运动θDx对整个运动并无影响,是多余自由度,因此,圆柱副实际相当一个移动副 故图示机构的自由度为:W=1×3+3×1-(6-1)(4-3)=1 |
||||