|
指令输入下的频率特性及波德图 |
||||
|
输出/ 输入 |
负载 情况 |
传递函数及动态参数 |
波德图 |
|
|
|
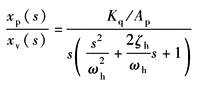
K=0 |
系统为Ⅰ型系统 动态参数: (1)速度增益Kq/Ap; (2)液压谐振频率 (3)液压阻尼系数ζh,见表传递函数及其简化 |
图中 L(ω)——幅频特性 φ(ω)——相频特性 ωc——穿越频率,ωc=Kq/Ap |
|
|
动态 特性 分析 |
动态特性由动态参数Kq/Ap、ωh、ζh所确定: (1)速度增益增大,则L(ω)上移、ωc增大。意味着系统精度、响应速度提高,但稳定性变差;注意:Kq随工作点变化,零位空载时Kq最大,稳定性最差 (2)ωh表征系统响应速度,是系统的极限频率,为提高ωh应增大Ap、βe而减小υt、mt。通常取βe=700MPa;注意:空气混入系统或采用软管时,βe大为降低 (3)ζh表征系统的相对稳定性,ζh主要取决于Kc。xv→0时,Kc、ζh值最小,ζhmin=0.1~0.2 |
|||
|
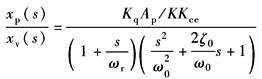
K≠0 |
系统为0型系统,动态参数: (1)位置增量KqAp/KKce; (2)转折频率 (3)综合固有频率 (4)综合阻尼系数ζ0见表传递函数及其简化 |
图中 穿越频率 |
||
|
动态 特性 分析 |
K≠0时,系统变成0型系统。动态特性由动态参数增益、ωr、ω0、ζ0所确定 (1)动态参数均与负载刚度K有关:K增大时,增益、ωc及ζ0减小,而ωr、ω0提高,即稳态误差增大、快速性降低、超调变小 (2)注意:当K由某值变成0,即由有弹性负载转入空载时,增益由KqAp/KKce增加到Kq/Ap。瞬间增益的提高,有可能使原来稳定的系统变得不稳定。如果存在这种情况,应采取变增益控制措施 |
|||
|
|
K=0 |
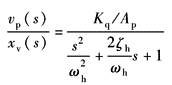
系统为0型系统,动态参数: (1)速度增益Kq/Ap; (2)液压谐振频率ωh; (3)液压阻尼系数ζh |
图中 虚线系加PI校正后的波德图 |
|
|
动态 特性 分析 |
(1)未加PI校正时,穿越频率ωc处的斜率为-40dB/dec,因ζh很小,因此相角储备r(ωc)很小;计及检测及伺服阀等环节造成的相位滞后以后,即使开环增益很小,闭环也可能不稳定;因此速度伺服阀系统须加PI校正 (2)采用PI校正后,穿越频率ω'c大为降低,即动态响应降低了 |
|||
|
|
K与Kh 相当 |
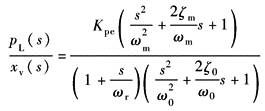
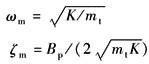
系统为0型系统 动态参数: (1)增益Kpe=Kq/Kce; (2)转折频率ωr; (3)综合固有频率ω0及阻尼ζ0; (4)机械固有频率ωm及阻尼ζm
|
|
|
|
K?Kh |
|
|||
|
K=Kh (常见) |
|
|||
|
动态 特性 分析 |
以pL输出时为压力控制;以驱动力Fg=pLAp输出时为力控制,有 (1)存在阻尼很小的二阶微分环节,且恒有ωm<ω0,ωm=ω0的点称为逆共振点,它是一个间断点;ωm是力控制系统频宽的极限值;ω>ωm易出现自激振荡,为不可用域 (2)为提高系统频宽,应设法增大ωc,为此应增大Kq、减小Ap;力及压力系统中,在保证驱动力的前提下,通过减小Ap来提高系统频宽,这一点是与位置及速度控制中不同的 |
|||