|
稳态误差的计算 |
||||||
|
(1)任意输入信号作用下的稳态误差计算 设系统在控制输入r(t)和干扰输入f(t)共用之下,则
则系统的稳态误差e(∞)为
式中
r(i)(∞)——输入函数的i阶导数在t=∞时的值, f(j)(∞)——干扰作用函数的j阶导数在t=∞时的值,
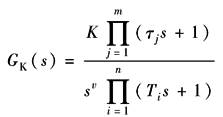
(2)典型控制输入作用下稳态误差的计算 典型输入作用下系统的稳态误差计算。可以根据系统的类型和系统的开环增益K以及相应的静态误差系数来计算。基本原理是利用拉氏变换的终值定理,即
① 系数的类型 设反馈控制系统开环传递函数形式如下:
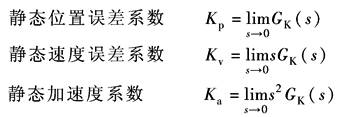
其中,υ为开环传递函数中所包含的积分环节个数,称为系统的无差度。无差度可以用来对系统进行分类: υ=0,称为0型系统 υ=1,称为Ⅰ型系统 υ=2,称为Ⅱ型系统 υ=3,称为Ⅲ型系统 实际系统中,υ越大对系统的稳定性越不利,因此实际系统大都要求υ≤2 ②静态误差系数
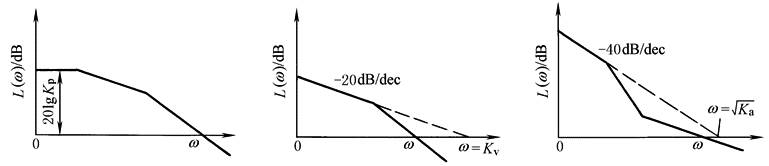
静态误差系数可以根据系统的开环对数幅频特性的低频特性来确定,如下图所示
根据开环对数幅频特性确定误差系数 典型控制输入作用下系统稳态误差e(∞)的计算如下表所示 |
||||||
|
典型控制输入作用下的稳态误差 |
||||||
|
系统型别 |
静态误差系数 |
阶跃输入r(t)=R |
斜坡输入r(t)=Rt |
加速度输入 |
||
|
υ |
Kp |
Kv |
Ka |
|
|
|
|
0 |
K |
0 |
0 |
|
∞ |
∞ |
|
1 |
∞ |
K |
0 |
0 |
|
∞ |
|
2 |
∞ |
∞ |
K |
0 |
0 |
|