|
比例气爪 |
||
|
表1 比例气爪的结构及原理 |
||
|
项目 |
简 图 |
说 明 |
|
结构 |
|
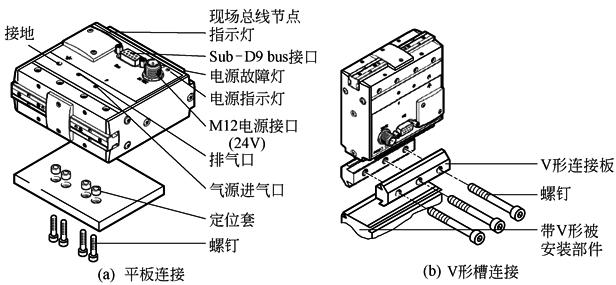
比例气爪由一个M12接口的电源(24V)及指示灯、一个Sub-D9的Profibus-DP接口及现场总线节点指示灯、一个气源接口(6bar)及排气口、一个接地接口等组成。其内部由一个带两个活塞的驱动器,两个带滚动轴承导轨的气爪、六个二位三通压电阀、压力传感器、电源控制电路板、过程控制电路板、通信硬件、位置检测印刷电路板等组成 |
|
原理 |
|
比例气爪的驱动是由气缸驱动器来实现的;气缸缸体内安装了左右两个独立的活塞,每个活塞都与外部的气爪相连,因此每个活塞的运动则表示单个气爪的移动。应用三组(六个3/2)压电阀对高灵敏度的比例气爪进行控制,该压电阀实质上是一个无泄漏、动态性能较佳的伺服比例阀。一组连接到气缸气腔的左端,另一组连接到气缸气腔的右端,第三组连接到左右两个活塞中间的气缸。三个腔室内的压力均由三个压力传感器来监测及控制,三组压电阀控制各腔室内的压力,通过调节活塞(气爪)两端气缸腔室内的压力,则实现气爪夹紧力的调节。此外,通过安装位置传感器,对气爪位置进行控制 比例气爪可实现两个气爪中的任意一个气爪单独运动,并对其夹紧力进行控制;也可实现两个气爪自对中的同步运动。它可检测工件的位置(感触后夹紧工件),也可根据设定的位置自行调节(夹头打开时的中心轴线位置)以及对夹头的开口度进行调整控制,还可对夹紧力进行逐步增加、减少,直至为零的控制 比例气爪有1个气源接口、1个24V的供电接口以及1个用于Profibus-DP的控制信号接口,比例气爪把整个控制及通信软件集成在其内部 |
|
表2 比例气爪的功能及技术参数 |
|||||
|
项目 |
说 明 |
||||
|
功能 |
单气爪/二气爪位置控制 |
单气爪/二气爪力控制 |
|||
|
单个气爪/二个气爪同时向设定的位置移动 |
单个气爪/二个气爪同时作夹紧力控制 |
||||
|
位置转换成力的控制(X-F ') |
力的控制转换成位置控制(F-X ') |
||||
|
|
对其中一个气爪进行定位,在定位过程中,当气爪夹头作用力达到规定数值时,其内部的控制程序将该值置于设定的“1”的力开关状态 |
|
对其中一个气爪的夹紧力F进行控制,如气爪夹紧力达到规定数值时,其内部的控制程序将该值置于设定的“1”的位置开关状态 |
||
|
位置控制前/后的力的控制(F1-X '-F2) |
位置控制转换成力的控制(X-X '-F) |
||||
|
当对某一气爪进行夹紧力控制,在到达X '位置前,F1有效。到达 X '位置后,F2有效。其内部的程序将该值置于“1”的力开关状态 |
对其中一个气爪进行位置控制,在到达X '位置时,内部的控制程序将其转换为F力的控制 |
||||
|
位置定位转换成力的控制(X-F '-F) |
力的控制转换成位置定位(F-X '-X) |
||||
|
对其中一个气爪进行位置定位控制时,当气爪夹紧力达到规定数值,其内部的控制程序将该值置于“1”的力F '开关状态,然后再转化为力的控制模式,并开始对力F的控制 |
对其中一个气爪进行力控制,在夹紧力控制过程中,达到规定的位置X '时,其内部的控制程序将该值置于“1”的位置开关状态,然后再转化为位置控制模式,并开始向设定的位置X移动 |
||||
|
气爪位置可自由移动的力控制 |
校正夹紧中心线后夹紧(XM-F) |
||||
|
气爪以设定的力F的夹紧,夹紧力可进行控制。气爪位置可自由移动 |
气爪在校正了夹紧中心线XM位置前提下,以设定的夹紧力进行夹紧 |
||||
|
校正气爪开口度和夹紧中心线后夹紧(X/X开口度-XM-XM/F) |
夹紧后移动夹紧中心位置(F-S-XM) |
||||
|
首先对气爪进行位置控制(气爪的X开口度及夹紧中心线XM),使其符合设定要求,初步定位完成后,即转化为以校正夹紧中心线XM为前提的夹紧力控制,并再次校正中心位置XM |
气爪在校正了夹紧力F的情况下,移动到设定的夹紧中心位置XM,移动时有一个速度指标S,将规定气爪进行移动的速度 |
||||
|
校正夹紧中心线后转化为开口度控制(XM-F=0-X开口度) |
夹紧中心线和开口度定位 |
||||
|
在校正好实际中心位置XM后,夹紧力F逐渐释放。然后控制装置转化为对开口度的定位控制 |
气爪夹头按照设定的夹紧中心线和开口度移动定位 |
||||
|
压紧(粘合)应用 |
|||||
|
|
对两个部件进行粘合,气爪夹头2将其中一个部件压向另一个部件,压力可调,最大可达50N。气爪1停滞不动。两个部件完成粘合 |
||||
|
技术 参数 |
比例气爪单个夹头的夹紧力为5~50N,单个气爪的行程为10mm,定位精度为±0.1mm,重量为600g |
||||