|
气动肌肉 |
|||||||||||
|
原 理 |
结 构 图 |
|
|||||||||
|
说 明 |
气动肌腱是一种拉伸驱动器,它模仿自然肌腱的运动。气动肌腱由一个收缩系统和合适的连接器组成。这个收缩系统由一段被高强度纤维包裹的密封橡胶管组成。纤维形成了一个三维的菱形网状结构。当内部有压力时,管道就径向扩张,轴向方向产生收缩,因此产生了拉伸力和肌腱纵向的收缩运动。拉伸力在收缩开始时最大,并与行程成线性比例关系减小。气动肌腱的收缩最大可达25%,即它的工作行程就是气动肌腱额定长度的25% |
||||||||||
|
连 接 结 构 |
连 接 件 示 意 图 |
|
1—N快插接头,用于连接具有标准内径的气管 2—QS快插接头,用于连接具有标准外径(符合CEOOPRPSAP标准)的气管 3—CK快拧接头,用于连接具有标准内径的气管 4—GRLA单向节流阀,用于调节速度 5—SG双耳环,允许气动肌腱在一个平面内转动安装 6—SGS关节轴承,带球面轴承 7—KSG/KSZ连接件,用于补偿径向偏差 8—MXAD-T螺纹销,用于连接驱动器附件 9—MXAD-R径向连接件,用于连接驱动器附件和径向供气口 10—SGA双耳环,带外螺纹,用于直接安装到气动肌腱上 11—MXAD-A轴向连接件,用于连接驱动器附件和轴向供气口 |
||||||||
|
说 明 |
气动肌肉作为驱动器,与普通气缸一样,图a是其与各种连接辅件的示意图。通过径向连接件9可与螺纹销8连接,并通过螺纹销8可与双耳环5、关节轴承6、连接件7和外部运动部件形成柔性驱动结构。气动肌肉的进/排气气口,可采用快插接头1、2,或快拧接头3,或单向节流阀4与径向连接件9连接,并将压缩空气输进气动肌肉腔内。进/排气气口可采用单端进/出方式,也可采用两端进/出方式 |
||||||||||
|
气动肌肉的技术参数与特性 |
主 要 技 术 参 数 |
规格 |
10 |
20 |
40 |
||||||
|
气接口 |
Æ连接件MXAD-…,从1/5.6-18起 |
||||||||||
|
工作介质 |
过滤压缩空气,润滑或未润滑(其他介质根据要求而定) |
||||||||||
|
结构特点 |
高强度纤维收缩隔膜 |
||||||||||
|
工作方式 |
单作用,拉 |
||||||||||
|
内径/mm |
10 |
20 |
40 |
||||||||
|
额定长度/mm |
40~9000 |
60~9000 |
120~9000 |
||||||||
|
最大附加负载,自由悬挂/kg |
30 |
80 |
250 |
||||||||
|
可从地面提起的最大附加负载,开始位置并未受到预拉伸/kg |
68 |
160 |
570 |
||||||||
|
最大许用收缩(行程)/mm |
额定长度的20% |
额定长度的25% |
|||||||||
|
室温下的放松长度/mm |
气管长度的3% |
||||||||||
|
重复精度/mm |
小于等于额定长度的1% |
||||||||||
|
最大许用预拉伸①/mm |
额定长度的3% |
||||||||||
|
最大收缩时的直径扩张量②/mm |
23 |
40 |
75 |
||||||||
|
迟滞,不带/带负载 |
小于等于额定长度的5%/2.5% |
小于等于额定长度的4%/2% |
|||||||||
|
最大角度误差 |
±1°,两个固定接口的轴之间 |
||||||||||
|
最大平行度误差 |
两接口之间每100mm长度的误差是2mm |
||||||||||
|
不带附加负载时的速度(6bar时)/m·s-1 |
0.001~1.5 |
0.001~2 |
|||||||||
|
安装型式 |
带附件 |
||||||||||
|
安装位置 |
任意(如果出现径向力则需要外部导向装置) |
||||||||||
|
工作压力/bar |
0~8 |
0~6 |
|||||||||
|
环境温度/℃ |
5~60 |
||||||||||
|
耐腐蚀等级CRC③ |
2 |
||||||||||
|
理论值/N |
650 |
1600 |
5700 |
||||||||
|
达到预拉伸时要求的力/N |
300 |
800 |
2500 |
||||||||
|
力的补偿/N |
400 |
1200 |
4000 |
||||||||
|
① 当附加有效的最大许用自由悬挂负载时,也相应得到了最大拉伸 ② 直径上的扩张决不能用于夹紧 ③ 耐腐蚀等级2,符合Festo 960070标准 元件必须具备一定的耐腐蚀能力,外部可视元件具备基本的涂层表面,直接与工业环境或与冷却液、润滑剂等介质接触 |
|||||||||||
|
特
性 |
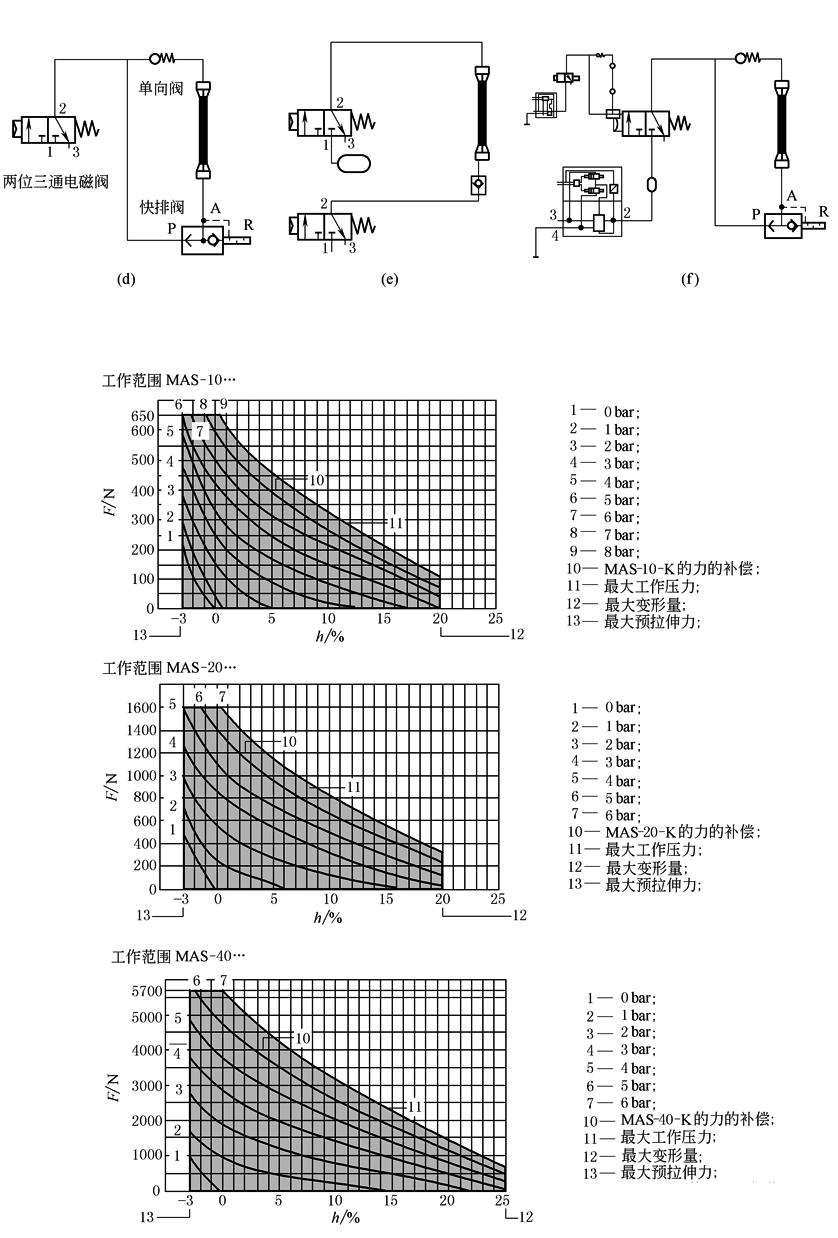
气动肌肉产生的收缩力(拉伸力)很大,是同径缸气缸的10倍,与普通气缸不同的是,气动肌肉在开始受到压缩空气作用后产生的收缩力(拉伸力)很大,收缩行程越大收缩产生的作用力越小(见图g作用力/收缩位移),不像普通气缸产生的力与行程无关(理论上),见图b。另外一个特性是气动肌肉产生的收缩力与供气压有关,供气压力越高收缩行程也越长,这一特性可使气动肌肉用作简单的定位用途。气动肌肉内部无机械零部件,运动平滑,无爬行、无颤抖现象,它的收缩行程改变与供气压力见图c。气动肌肉重量轻,所占空间很小,具高动态特性,频率高达100Hz。由于它无活塞杆裸露在外,可在肮脏环境下运转。它与普通类气缸相比,在低速0.001mm/s、加速度100m/s2下具有很大优势。无论在夹紧、高加速、振荡、定位、运动无爬行等应用领域越来越能发挥其优越特性。对于频率大于2Hz的气动系统,采取的措施是两端供气、一端装快排阀,如图d所示。对于频率大于10Hz的系统配置,可采用二位三通高速换向阀。二位三通高速换向阀的进气口处配置储气罐,储气罐与阀尽可能接近,阀与气动肌肉的安装也尽可能接近,接头和管路的尺寸尽可能大些。尽可能采用轴向供气的方式,如图e所示。对于需作简单定位的气动系统,可在二位三通供气处与一个气动比例阀相连,控制/调节气动比例阀压力则可获得定位位置,如图f所示
(g)作用力/收缩位移图 |
||||||||||
|
计算举例 |
例1 已知:一个气动肌肉在静止状态时拉伸力为0N,气动肌腱把一个80kg的恒定负载从支撑面提升到100mm处。工作压力为6bar 求:合适的气动肌腱的尺寸(直径和额定长度) 解:(1)确定所需肌腱的规格 根据拉力来确定合适的气动肌腱直径。如所需提起80kg的负载,即拉伸力为800N,根据图g中的拉力,就可选择MAS-20-,即为图h所示的作用力/位移表 (2)标出负载作用点1 在MAS-20-…的作用力/位移图表上标出负载作用点1,当拉伸力F=0N时,压力p=0bar (3)标出负载作用点2 在作用力/位移图表上标出负载用点2,作用力F=800N,压力p=6bar (4)读取长度变化 读取X轴上两负载作用点之间肌腱的长度变化(收缩量以%表示)。结果:10.7%的收缩量 (5)计算额定长度 如果行程为100mm,肌腱的额定长度就是把该行程除以上述收缩量的百分比。结果:100mm/10.7%=935mm (6)结论 应订购额定长度为953mm的气动肌腱。在无外力作用下,为了将80kg的负载提升到100mm,则需要气动肌腱MAS-20-N935-AA-…(N表示气动肌腱的额定长度,未包括安装所需长度,气动肌腱被剪下长度大于额定长度。AA表示标准材料为氯丁二烯)
(h)作用力/位移表 例2 已知:需气动肌肉作张力弹簧功能,当被拉伸状态时它的力为2000N,收缩状态时它的力为1000N,所需行程(弹簧长度)为50mm,气动肌肉的工作压力为2bar 求:合适的气动肌腱的尺寸(直径和额定长度) 解:(1)确定所需肌腱的规格 确定最合适的气动肌腱直径。如所需的力为2000N,根据图g中的拉力,就可选择MAS-40-,即为图i作用力/位移表 (2)标出负载作用点1 在MAS-40-…的作用力/位移图表上标出负载作用点1,作用力F=2000N,压力p=2bar (3)标出负载作用点2 在作用力/位移图表上标出负载作用点2,作用力F=1000N,压力p=2bar (4)读取长度变化 读取X轴上两负载作用点之间肌腱的长度变化(收缩量以%表示)。结果:7.5%的收缩量 (5)计算额定长度 如果行程为50mm,肌腱的额定长度就是把该行程除以上述收缩量的百分比。结果:50mm/7.5%=667mm (6)结论 应订购额定长度为667mm的气动肌腱。当把气动肌腱作为张力弹簧时,如果力的大小为2000N,弹簧的行程是50mm,那么所需的气动肌腱是MAS-40-N667-AA-…
作用力/位移表 |
||||||||||
|
应 用 举 例 |
概 述 |
气动肌肉的初始力与加速度大,无摩擦,运动频率高,停止柔和,可应用在钻孔、切削、压榨、冲压、印刷等行业;气动肌肉的夹紧力大,重量轻,容易调整,也可应用在大负载机械手等行业;气动肌肉的动态性能非常好,动作频率高,维护方便,还可应用在送料带、排序、振动料斗器等行业;气动肌肉的运动平滑,低速运行无爬行,可控性好,可应用在张力控制、磨、抛光、焊接、定量给料设备、传送带纠偏等行业;气动肌肉的密封结构,耐恶劣环境,无泄漏,可应用在木材加工、铸造、采矿、建筑业(混凝土)、陶瓷等行业 |
|||||||||
|
作 用 力 大 |
用于纸板箱打孔的驱动器 |
用于标签冲孔的驱动器 |
用于切割塑料型材的飞刀的驱动器 |
||||||||
|
气动肌腱动态性好,加速度大,运动频率高,动力强劲,能产生很好的打孔效果。使用偏心杆可进一步增强这些特性。通过两根机械弹簧实现耐磨系统的复位
|
气动肌腱重量轻,且没有移动部件(如:活塞),因此具备很高的循环速率。这种简单的结构(使用两个弹簧和一个肌腱进行预拉伸)替代了使用气缸时要用到的复杂的滚轮杠杆夹紧系统。在可能的范围内将频率从3Hz提高到5Hz。迄今为止已达到五千多万次工作循环
|
气动肌腱的各种性能在该应用中得到了理想的运用:行程开始时能立即迅速加速,确保有足够大的力分割塑料型材,同时柔和软停止可使飞刀平稳到达终端位置
|
|||||||||
|
无 爬 行 移 动 |
用于卷绕设备的制动驱动装置 |
用于自动研磨机上计量分配器的驱动器 |
用于卷绕过程中的走带纠偏控制 |
||||||||
|
无摩擦的肌腱可使卷轴匀速和缓地制动,以确保在恒定速度下进行高精度卷带。使用比例控制阀(它的信号由力传感器调节)进行控制
|
由一根弹簧进行预拉伸的肌腱可无跳动且匀速地打开和关闭计量阀。这确保了研磨材料的正确计量。使用比例控制阀进行控制,它可以根据研磨机的皮带速度调节颗粒数量
|
目的:匀速卷起纸、金属薄片或纺织品 要求:无摩擦驱动器,具有快速响应特性 解决方法:气动肌键。传感器一检测到边缘不对齐就用2个气动肌键替代活动标架上的转轴。这意味着走带边缘是100%对齐的
|
|||||||||
|
简 单 的 定 位 系 统 |
简单的提升设备,用于处理混凝土板和车轮辕 |
用于自动洗衣机送料单元的驱动器 |
用于提升设备 |
||||||||
|
只需调节压力即可实现中间位置。通过手柄式阀为气动肌腱加压或泄压,使工件按要求提升或者下降。气动肌腱长度可长达9m,适用于各种应用场合
|
气动肌腱可以进行旋转动作。就像人体一样,屈肌和伸肌驱动齿轮,该齿轮可以将送料单元旋转120°。通过调节压力,比例方向控制阀可实现中间位置定位
|
只需若干个滑轮及若干根气动肌肉便可提升重物,控制气动肌肉的供给压力便可控制提升所需高度
|
|||||||||
|
作 比 例 定 位 控 制 |
辊轴张力控制 |
进料闸门的控制 |
|||||||||
|
辊轴张力控制在纸张、薄膜、布料等行业是常见的控制方式之一,气动肌肉可根据压力变化形成位移变化,气动肌肉无爬行,动态频响高,可灵敏地反馈到辊轴间的位移
|
当料斗内装满原料时,料斗仓门的开启需很大的力,此时气动肌肉既要随时打开仓门,又要快速关小仓门(MPPE为Festo气动比例阀,可调节气动肌肉腔内压力,即调节料斗仓门开口度)
|
||||||||||
|
恶 劣 的 环 境 条 件 |
棘爪的驱动装置 |
抛光机上应用 |
|||||||||
|
不受污垢影响的气动肌腱因其重量轻、关闭夹头时作用力大而成为棘爪的理想驱动装置。气动肌键完全封闭的系统适用于仓库环境,甚至在恶劣的条件下使用也不会影响其寿命
|
不受抛光后污物影响的气动肌腱。其作用力大,且易调节抛光压力,压紧抛光时无振颤,是抛光机的理想驱动装置
|
||||||||||
|
动 态 特 性 |
用于分类/止动装置的驱动器 |
用于振动送料斗的驱动器 |
用于检测不合格产品 |
||||||||
|
气动肌腱速度快,加速性能好,是传输过程中实现分类和止动功能的理想驱动器。由于响应时间短,因此环速率大幅度提高
|
在送料过程中,送料斗和贮存仓容易发生堵塞问题。气动肌腱可方便地在10~90Hz之间无级调节一个气动振动器,这样就确保了持续传送
|
当生产流水线在高速输送时,传感器上检测到不合格产品需立即被分拣出,气动肌腱速度快,加速性能好,可较好适应流水线高速输送特性
|
|||||||||
|
注 意 事 项 |
(1)如气动肌肉长时间内部充压,且位置不变,会因此变松弛,作用力会减弱。或虽内部无施压,也不能长时间承担一个静态的负载(譬如超过500h),否则气动肌肉比原来会有明显的松弛 (2)气动肌肉最大收缩率不得超过25%,收缩率越大时,寿命越短且此时产生的拉伸力越小 (3)气动肌肉使用寿命在10~1000万次,收缩率越小寿命越长,压力越低寿命越长,负载越小寿命越长,温度在20~60℃时,寿命越长 (4)大于60℃的情况下持续使用,会使橡胶过早老化,但短时间的使用是允许的(譬如十几秒)。当温度低于5℃的情况时,气动肌肉可动态应用,由于压缩空气在气动肌肉腔内运动会产生热量,但不能期望等待此运动的热量升到20℃,如果需要在低于20℃或高于60℃范围下应用,则要对橡胶的成分进行改变,其他特性(材料的耐久性)也会有所变化 |
|
|||||||||
|
(5)影响频率的因素有:收缩行程、负载、压力、温度、阀、气源管路等。气动肌肉的最高频率可达100Hz,但收缩率在很小的情况可达10亿次。对于高频率气动肌肉通常采用高速阀,高速阀进口处装有储气筒,气动肌肉供气釆用两端轴向进/排气方式,以利于其均匀受压力及保持气流通畅、冷却 (6)气动肌肉受压径向膨胀,但不能用其径向作为夹紧使用。因为在收缩时,会与被夹物体之间产生磨损,导致气动肌肉的损坏 (7)气动肌肉沿着滑轮绕过时,会发生弯曲变形,滑轮的直径应至少是气动肌腱内径的10倍 (8)气动肌肉安装时应避免扭曲或受偏心负载,见图j |
|||||||||||