|
机构动态静力分析的解析法 |
|
|
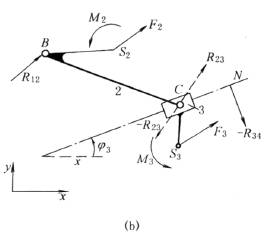
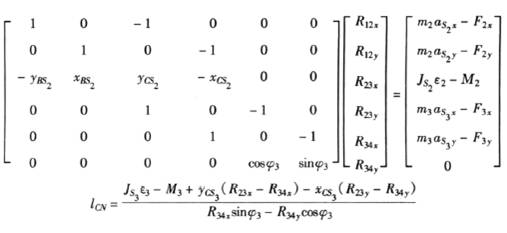
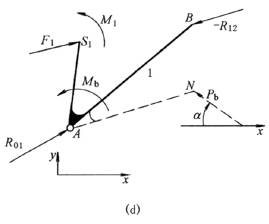
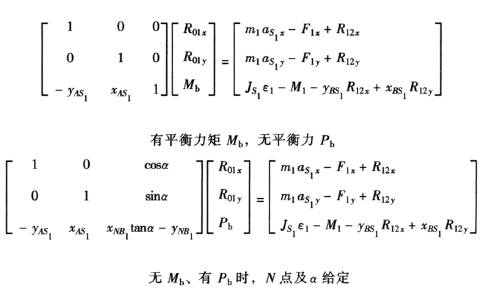
下表建立了受有未知外力的平衡构件(转动或移动的联架杆)和三种常见的Ⅱ类杆组的力平衡方程。为了便于列矩阵方程:规定以A、B、…、D表示运动副;i、j表示构件号;以Rij表示构件i对构件j的运动副反力,且下标i的值必小于j的值,且以-Rij表示Rji,再以下标x,y表示其x、y方向的分量,如R12x、R12y;以Si表示构件i的质心位置。构件上两点间的距离以分量形式表达,如C点到B点的距离表示为xCB=xC-xB、yCB=yC-yB,lCB=(x2CB+y2CB)1/2;以mi、JSi表示构件i的质量和对质心的转动惯量;以aSi及εi表示构件i的质心加速度和角加速度。将所有作用在构件上的已知外力(矩)向质心S简化得到一个主矢Fi和主矩Mi(不含惯性力及矩)。力矩规定以逆时针方向为正。对每个构件分别列出∑Fxi=0、∑Fyi=0及∑MSi=0方程,略去中间过程,便得到下表的各方程 利用下表中的公式可以对多杆Ⅱ级平面机构进行分析。只需将受有未知外力(矩)的机构看成平衡构件,由远离平衡构件处依次将机构折成若干个Ⅱ级杆组,仿照下表写出各杆组及平衡构件的平衡方程,编成子程序,便可进行力分析计算。程序可自编或采用有关软件中的程序,但必须注意符号的对应关系 |
|
|
简 图 |
力 和 力 矩 平 衡 方 程 式 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|