|
行星轮系与Ⅱ级杆组的组合机构 |
|
|
图(1) 单排外啮合行星轮系-连杆组合机构
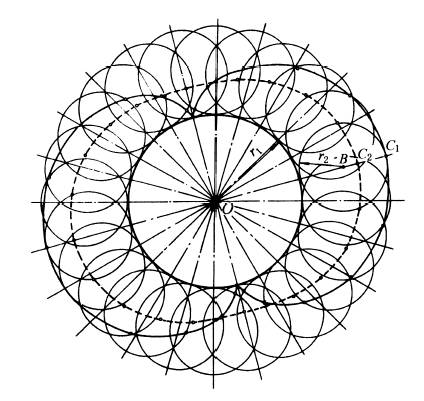
K=2 实线:λ=1 虚线:λ=1/3 图(2) 外摆线和变幅外摆线 |
|
|
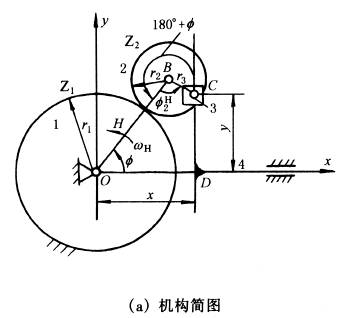
这种组合机构是由一个最简单的单排内啮合或外啮合行星轮系与一个Ⅱ级杆组串联组成,一般以行星轮系的转臂为主动件,利用行星轮与杆组铰接点所走的轨迹,使输出构件实现带停歇期的往复移动或摆动。 |
|
|
(1)单排外啮合行星轮系与双滑块杆组的组合机构 |
这种组合机构如图(1)所示,C点的轨迹为外摆线或变幅外摆线,它根据两齿轮的节圆半径r1、r2以及BC长度r3的不同,而有不同的轨迹。图(2)为K=r1/r2=2时C点所画出的轨迹,当λ=r3/r2=1时,则C1点的轨迹为图中实线所示的外摆线;当λ=1/3时,则C2点的轨迹为虚线所示的短幅外摆线。由图中可见,此短幅外摆线上有两段为近似的直线,如滑块3上C点行经此两段近似直线时,则输出杆4将产生近似的停歇。这种组合机构的设计步骤和方法如下。 ①行星轮系12H中各构件间的角速比和转角关系。 i2H=ω2/ωH=1+K (1) 轮2的转角: f2=(1+K)f (2)
式中 f—— 主动转臂H的转角; K—— 齿数比,K=z1/z2。 ②行星齿轮2上C点的轨迹方程式。
式中 r1、r2—— 齿轮1与2的节圆半径; r3—— BC的长度。 ③输出杆4的位置和行程h。
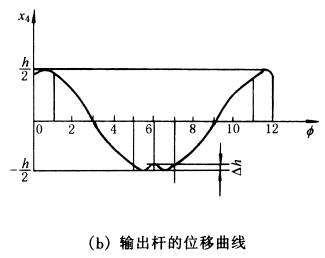
式中 H—— 转臂的长度,当f=0时,x4=H-r3;f=π 时,x4=-(H-r3)。 行程 h=(H-r3)+(H-r3)=2(H-r3) (6) 图(1)b为转臂H转一周中输出杆4的位移曲线x4=f(f),此机构取K=2。 ④输出杆4的速度υ4和加速度a4。
式中 ωH—— 转臂H的角速度; εH—— 转臂H的角加速度,当ωH为常数时,εH=0。 ⑤如工作要求输出杆4在其行程两端具有近似停歇区,并给定转臂H的相应转角,计算转臂长度H与r3的比值σ和r3与r2的比值λ。本例中取K=2,并给定输出杆4在行程两端近似停歇时转臂H的相应转角各为60°。设计时,假定输出杆在行程两端停歇时的位置为对称分布,即按f=0°和f=30°时的x4值相等的条件求解(同理,按f=150°和f=180°时x4值相等的条件),可得: H-r3=Hcos30°
⑥行程h及其微动值Δh。输出杆4在极限位置时转臂H相应的位置角f可按下法求得:令式(7)中 |
|
(2)单排内啮合行星轮系与Ⅱ级杆组的组合(实现近似停歇运动) |
表单排内啮合式行星轮系-连杆组合机构的计算中图a为这种组合机构K=r1/r2=3,λ=r3/r2=1时C点的轨迹mm;当λ=1/2时,则C点的轨迹为具有近似直线段的带圆角三角形如图b;当λ=1.5时,则C点的轨迹为长幅内摆线(图未示出)。若选取适当的连杆长度l3,使以D为中心、l3为半径的圆弧通过内摆线mm上的C、C ' 和C " 点,则输出滑块4将出现近似停歇段,且有相应于主动转臂转角为±f的停歇时间。如果将图a的滑块4改为摇杆5(如虚线所示),则输出摇杆5在摆动到其右极限位置时将具有停歇期。改变K和λ可以得到不同形状的变幅内摆线,图c所示为K=4,λ=1/3时,C点的轨迹为具有近似直线段的带圆角正方形;如取K=2.5,λ=2/3,此时C点的轨迹为具有近似直线段的带圆角五角星形(如图d)。图b、c为C点处再铰接一个双滑块杆组34,则当C点途经近似直线段时,输出杆4将出现停歇期。这种组合机构的设计步骤和方法见表单排内啮合式行星轮系-连杆组合机构的计算。 |