|
螺旋机构传动型式 |
|||
|
序号 |
型 式 |
简 图 |
特 点 |
|
1 |
螺杆旋转,并沿轴线移动,螺母固定 |
|
与二构件斜面机构类似。可获得较高的精度,但结构尺寸大 |
|
2 |
螺杆旋转,螺母沿轴线移动 |
|
与三构件斜面机构类似。有限制螺杆轴向窜动和螺母转动的结构 结构尺寸较小,但精度较低,结构较复杂 |
|
3 |
螺母旋转,螺杆移动 |
|
与三构件斜面机构类似。有限制螺母轴向窜动和螺杆转动的结构 精度较低,结构尺寸大,结构复杂 |
|
4 |
螺杆固定,螺母旋转并沿螺杆轴向移动 |
|
与二构件斜面机构类似。精度最低 |
|
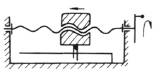
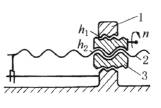
5 差 动 螺 旋 |
1.二螺旋左右安排,是第1、2二种型式的组合 |
|
s2=(h1-h2) n=(h1-h2)φ/2π 式中 s2—— 构件2相对构件1的轴向位移,正值表示向左移,负值表示向右移 h、h2—— 构件1、2的导程,右旋以正值代入,左旋以负值代入 n—— 构件3的转数,顺时针方向以正值代入,逆时针方向以负值代入 φ—— 转角 为获得微量移动,可采用二个导程相差很小,且旋向相同的螺旋组成 |
|
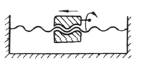
2.二螺旋内外安排,是第1、3二种型式的组合 |
|
||
|
3.螺杆螺母二者同时输入运动的差动螺旋 |
|
s2=(n2-n3) h2=(φ2-φ3) h2/2π 式中 s2、n2、n3、h2的正负号同上,由于螺杆与螺母的转数与转向的不同,螺母可获得各种不同的(大小和方向)移动速度 |
|