|
几种电-气比例/伺服阀 |
|||||||
|
名称 |
结 构 原 理 图 |
工作原理、组成和特点 |
|||||
|
喷嘴挡板式电气压力比例阀 |
(a)喷嘴挡板式比例压力阀结构原理 1—挡板;2—喷嘴;3—喷嘴背压腔;4—膜片;5—排气阀;6—内阀; 7—阀座;8—压力传感器;9—控制器;10—固定节流孔
(b)电气比例阀静态特性曲线 |
图a所示为电-气比例阀(又称比例调节器)结构原理。它由控制器、喷嘴-挡板、膜片组件、压力传感器、内阀等主要部件组成。它是基于压力反馈的原理工作的,并可实现输入信号与输出压力成比例关系。当控制输入信号增大时,由压电晶体构成的挡板1靠近喷嘴2,使喷嘴背压腔3内的压力上升,作用于膜片4上,压下排气阀5,由于内阀6与排气阀连动,输出口被打开,压力气体通过输出口流向负载,成为输出。另外此压力气体通过压力传感器8转换成电信号,反馈到控制器9中,与控制输入信号进行比较,产生偏差信号,修正输出。这样通过不断的反馈以实现输出气体压力和控制输入信号成比例关系。图b为该电气比例阀的静态特性曲线图 |
|||||
|
动铁式比例压力阀 |
(c)比例压力控制阀 1—控制电路;2—比例电磁铁;3—阀芯; 4—阀体;5—反馈弹簧;6—反馈气路
|
动铁式比例压力控制阀是由一个二位三通的硬配阀阀体和比例电磁铁两大部分所组成,如图c所示。通常,比例电磁铁部分包含一个控制电路(包括一个比例放大器电路)。当输入电压信号(电流)经过比例放大器转换为与其成比例的驱动电流Ie,该驱动电流作用于比例电磁阀的电磁线圈,使永久磁铁产生与Ie成比例的推力Fe,并作用于阀芯3,使二位三通阀的阀口被打开,气源与输出口接通,形成输出气压,该气压经过气路6作用于阀芯底部产生反馈力Ff并与电磁力相抵抗直至平衡。此时,满足下列方程式 Ff+X0KXF=Fe+ΔF (1) 从图中看出反馈力 Ff=Afpa (2) 又因为,电磁力Fe与驱动电流Ie成比例关系,因此,也同输入电压信号Ue成比例关系,所以 Fe=KIFIe=KIFKUIUe 式中,KIF为比例电磁铁的电流-力增益;X0为反馈弹簧的预压缩力;KUI为比例放大器的电压-电流增益;KXF为反馈弹簧的刚性系数;Af为阀芯底部截面积;Fe为电磁力;pa为输出口A的压力;ΔF为摩擦力
动铁式比例压力阀的压力曲线随不同时间的输入信号而变化,如图d所示 |
|||||
|
PWM比例压力阀 |
|
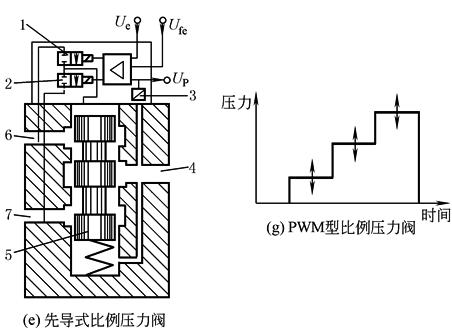
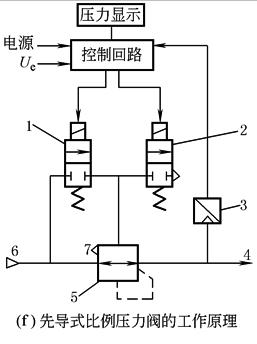
PWM(PulseWidthModulation)比例压力阀的原理见图f PWM脉冲宽度调制的比例压力阀采用脉宽调制技术将输入的模拟信号经脉冲调制器调制成具有一定频率和一定幅值的脉冲信号,脉冲信号放大后,控制两个二位二通高速电磁换向阀。二位二通电磁阀的输出具有一定的压力和流量,以控制它的负载(对于PWM比例阀而言,该负载就是作用在弹簧上的阀芯,使阀芯上下移动,或开大或减小阀口的间隙)。同时,PWM比例阀内设置了压力传感器,用来检测比例阀的输出压力。根据输出压力与输入信号压力的偏差进入PWM模块调节控制器,对两个二位二通电磁阀进行反馈,或对其进行进气补偿或排气释放,以达到所需要的平衡要求 该阀的特点是,其结构为非释放型,驱动两个二位二通电磁阀(作先导用)高频振动时,耗气量低,控制精度为0.5%~1%(满量程),响应时间为0.2~0.5s,适用于中等控制精度和一般动态响应的控制场合。PWM比例压力阀压力曲线呈阶梯形,如图g所示 先导式比例压力阀是由一个二位三通的硬配阀阀体和一组二位二通先导控制阀、压力传感器和电子控制回路所组成。如图e所示 当压力传感器检测到输出口气压pa小于设定值时,先导部件的数字电路输出控制信号打开先导控制阀1,使主阀芯上腔的控制压力p0增大。阀芯下移,气源继续向输出口充气,输出压力pa增高。当压力传感器检测到输出气压pa大于设定值时,先导部件的数字电路输出控制信号打开先导阀2,使主阀芯的控制压力与大气相通,p0适量下降,主阀芯上移,输出口与排气口相通,pa降低。上述的不断的反馈调节过程一直持续到输出口的压力与设定值相符为止 由该比例阀的原理可以知道,该阀最大的特点就是当比例阀断电时,能保持输出口压力不变。另外,由于没有喷嘴,该阀对杂质不敏感,阀的可靠性高 |
|||||
|
|
1,2—先导控制阀; 3—压力传感器; 4—输出口; 5—主阀芯(先导式放大器); 6—气源口; 7—排气口; Ue—输入信号; Ufe—外反馈信号; Up—输出信号; |
||||||
|
两位三通气动比例流量阀 |
二位三通型气动比例流量阀是由一个二位三通硬配阀阀体和一动铁式的比例电磁铁组成,图h为二位三通型比例流量阀。当输入电压信号Ue经过比例放大器转换成与其成比例的驱动电流Ie,该驱动电流作用于比例电磁铁的电磁线圈,使永久磁铁产生与Ie成比例的推力Fe并作用于阀芯3使其右移。阀芯的移动与反馈弹簧力Ff相抗衡,直至两个作用力相平衡,阀芯不再移动为止。此时满足以下方程式 Ff+X0KXF=Fe±ΔF (1) Ff=KXFX (2) Fe=KIFIe=KIFXUIUe (3) 将式(2)、式(3)代入式(1)整理后得
|
||||||
|
式中 Ff——反馈弹簧力 X0——反馈弹簧预压缩量 KXF——反馈弹簧刚性系数 X——阀芯的位移 Fe——电磁驱动力 KIF——比例电磁铁的电流-力增益 KUI——比例放大器的电压-电流增益 Ie——比例驱动电流 Ue——输入电压信号 K——为比例阀的增益,即比例系数, 从式(4)可见,阀芯的位移X与输入电压信号Ue基本成比例关系 |
1—控制电路;2—比例电磁铁; 3—阀芯;4—阀体;5—反馈弹簧 |
||||||
|
三位五通比例流量阀(亦称气动伺服阀) |
|
二位三通型比例流量阀仅对一输出流量进行控制,而三位五通型则同时对两个输出口进行跟踪控制。又因为此阀的动态响应频率高,基本满足伺服定位的性能要求,故也被称为气动伺服阀 三位五通比例流量阀是一个三位五通型硬配阀阀体与一个含动铁式的双向电磁铁的控制部分所组成,如图i控制放大器除了一个动铁式的双向电磁铁之外还有一个比例放大器、位移传感器及反馈控制电路。动铁式双向电磁铁与阀芯被做成一体 三位五通比例流量阀的工作原理是:在初始状态,控制放大器的指令信号Ue=0,阀芯处于零位,此时气源口P与A、B两输出口同时被切断,A、B两口与排气口也切断,无流量输出;此时位移传感器的反馈电压Uf=0。若阀芯受到某种干扰而偏离调定的零位时,位移传感器将输出一定的电压Uf,控制放大器将得到的ΔU=-Uf放大后输出电流给比例电磁铁,电磁铁产生的推力迫使阀芯回到零位。若指令信号Ue>0,则电压差ΔU增大,使控制放大器的输出电流增大,比例电磁铁的输出推力也增大,推动阀芯右移。而阀芯的右移又引起反馈电压Uf增大,直至Uf与指令电压Ue基本相等,阀芯达到力平衡。此时: Ue=Uf=KfX(Kf为位移传感器增益) 上式表明阀芯位移X与输入信号Ue成正比。若指令电压信号Ue<0,通过上式类似的反馈调节过程,使阀芯左移一定距离。阀芯右移时,气源口P与A口连通,B口与排气口连通;阀芯左移时,P与B连通,A与排气口连通。节流口开口量随阀芯位移的增大而增大 上述的工作原理说明带位移反馈的方向比例阀节流口开口量及气流方向均受输入电压Ue的线性控制。这类阀的优点是线性度好,滞回小,动态性能高 |
|||||
|
三位五通比例流量阀的主要技术参数 |
|||||||
|
规格 |
M5 |
G1/8LF |
G1/8HF |
G¼ |
G3/8 |
||
|
最大工作压力/MPa |
1 |
|
|
|
|
||
|
工作介质 |
过滤压缩空气,精度5μm,未润滑 |
||||||
|
设定值的输入 电压/电流 |
0~10VDC 4~20mA |
|
|
|
|
||
|
公称流量/L·min-1 |
100 |
350 |
700 |
1400 |
2000 |
||
|
电压 |
24VDC±25% |
||||||
|
电压脉动 |
5% |
||||||
|
功耗/W |
中位2,最大20 |
||||||
|
最大频率/Hz |
155 |
120 |
120 |
115 |
80 |
||
|
响应时间/ms |
3.0 |
4.2 |
4.2 |
4.8 |
5.2 |
||
|
迟滞 |
最大0.3%,与最大阀芯行程有关 |
||||||