|
可动部件驱动机构(电-机械转换器) |
||||||
|
名称 |
结构原理图 |
工作原理 |
组成和优缺点 |
|||
|
喷
嘴
挡
板
式 |
|
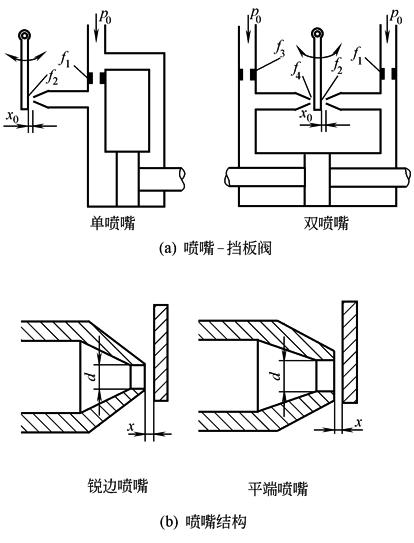
喷嘴挡板可分为单喷嘴和双喷嘴两种,按结构型式不同,又可以分为锐边喷嘴挡板和平端喷嘴挡板两种(见图b)。锐边喷嘴挡板的控制作用是靠喷嘴出口锐边与挡板间形成的环形面积(节流口)来实现的,阀的特性稳定,制造困难。平端喷嘴挡板的喷嘴制成有一定边缘圆环形面积的平端,当喷嘴的平端不大时,阀的特性与锐边喷嘴挡板阀基本接近,性能也比较稳定 |
喷嘴挡板的特点是结构简单、灵敏度高、制造比较容易。故价格较低,对污染不如滑阀敏感,由于连续耗气,效率较低。一般用于小功率系统或作两级阀的前置级。在气动测量,气动调节仪表和气动伺服系统得到了广泛的作用 |
|||
|
直 流 比 例 电 磁 铁 |
1—极靴;2—工作气隙;3—衔铁; 4—导套;5—外壳;6—控制线圈 |
图c为一种典型的直流比例电磁铁的工作原理,其磁路(图中虚线所示)由前端盖极靴1经工作气隙2、衔铁3、径向非工作气隙、导套4、外壳5回到前端盖极靴。导套分前后两段由导磁材料制成,中间用一段非导磁材料焊接。导套前段的锥形端部和极靴组合,形成盆形极靴。它的尺寸决定比例电磁铁的稳态特性曲线的形状。导套与壳体之间装入同心螺线管式控制线圈6 当向控制线圈输入电流时,线圈产生磁势。磁路中的磁通量除部分漏磁通外,在工作气隙附近被分为两部分(如图d),一部分磁通Φ1沿轴向穿过气隙进入前端盖极靴,产生作用于衔铁上的轴向力为F1。气隙越小,F1越大。另一部分磁通Φ2则穿过径向间隙经盆口锥形周边回到外壳,这部分磁通产生作用于衔铁上的力为F2,其方向基本与轴向平行,并且由于是锥形周边,故气隙越小,F2也越小。作用于衔铁上的总电磁力为 Fm=F1+F2 通过对盆口锥形结构尺寸的优化设计,使F1和F2受衔铁气隙大小的影响相互抵消,可以得到水平的位移-力特性曲线(如图e)。但这种抵消作用只在一定的气隙范围内有效。因此一般直流比例电磁铁的位移-力特性分为三个区域:一是吸合区,二是工作区,三是空行程区。工作区内的位移-力特性呈水平直线。应适当控制比例阀的轴向尺寸,使阀的稳态工作点落在该区域内 |
直流比例电磁铁具有结构简单、价格低廉、输出功率-重量比大等优点,是目前流体比例控制技术中应用广泛的一种电-机械转换器。直流比例电磁铁在气动比例元件中直接驱动气动放大器,构成单级比例阀。这类电磁铁的缺点是频宽较窄。但通过减少线圈匝数、增大电流并采用带电流反馈的恒流型放大器等措施可以提高它的频宽 常见的直流比例电磁铁可分为力输出和位移输出两大类。位移输出比例电磁铁是在力输出的基础上采取衔铁位移电反馈或弹簧力反馈,获得与输入电信号成比例的位移量 直流比例电磁铁的数学模型 动态简化传递函数为
式中 Fm——输出力,N U——放大器输入电压,V Rc——控制线圈电阻,W Rp——放大器内阻,W Lc——控制线圈电感,H Ku——电压-力增益,N/V s——水平位移,m |
|||
|
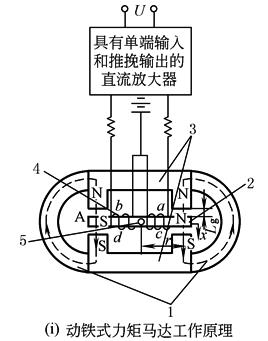
动 铁 式 力 马 达 |
|
两激磁线圈极性相同互相串联连接,并由恒流电源供给激磁电流,产生极化磁场。由于左右磁路对称,极化磁场对衔铁的作用合力为零 两控制线圈极性相反互相串联或并联。输入控制电流后产生控制磁场,其方向和大小由输入电流确定。该磁场与极化磁场共同作用于衔铁,在左右工作气隙内产生差动效应,使衔铁得到输出力。由于采用激磁线圈和特殊的盆口尺寸,保证了输出力可双向连续比例控制,无零位死区。力马达的控制增益随激磁电流的大小而变,便于控制和调节 数学模型:动铁式力马达的动态传递函数具有与直流比例电磁铁相同的形式,只是参数有所不同 |
动铁式力马达具有驱动功率大、固有频率高等优点,可以输出推力和拉力,是一种较理想的电-机构转换器 动铁式力马达采用左右对称的平头盆形动铁式结构,由软磁材料制成的壳体1,轭铁2,衔铁3,带隔磁环的导向套4,激磁线圈5、7及控制线圈6、8等组成 |
|||
|
名称 |
结构原理图 |
工作原理 |
组成和优缺点 |
|||
|
动 圈 式 力 马 达 |
|
永久磁铁产生的磁路如图中虚线所示,它在工作气隙中形成径向磁场,载流控制线圈的电流方向与磁场强度方向垂直。磁场对线圈的作用力由下式确定 Fm=πDBgNcI (2) 式中 Fm——动圈式力马达输出力,N D——线圈平均直径,m Bg——工作气隙内磁场强度,T Nc——线圈匝数 I——线圈输入电流,A 可见Fm与线圈输入电流I之间存在正比关系 数学模型:动圈式力马达的动态传递函数,其形式与直流比例电磁铁的相同 |
图g是典型的动圈式力马达。它是由永久磁铁1、导磁架2、线圈架3、线圈4等组成。其尺寸紧凑、线性行程范围大,线性好、滞环小、工作频带较宽。缺点是输出功率较小。由于它适用于干式工作环境,故在气动控制中应用较为普遍,可作为双级阀的先导级或小功率的单级阀 |
|||
|
动 圈 式 力 矩 马 达 |
|
动圈式力矩马达的工作原理与动圈式力马达基本相似 永久磁铁产生的磁路如图中虚线所示,它在工作气隙中形成磁场,磁场方向如图所示。载流控制线圈的电流方向与磁场强度方向垂直,同时矩形线圈与转动轴相平行的两侧边a和b上的电流方向又相反,磁场对线圈产生力矩,其方向按左手法则判定,其大小由下式确定 Mm=2rWBgNcI (3) 式中 Mm——动圈式力矩马达输出力矩,N·m W——线圈侧边a、b的边长,m r——线圈侧边与转轴的平均距离,m 其余符号含义同上 数学模型:动圈式力矩马达的动态传递函数为
|
它是由永久磁铁1、导磁架2、矩形线圈架3、线圈4等组成。矩形线圈架可绕中心轴转动 |
|||
|
动 铁 式 力 矩 马 达 |
|
永久磁铁产生的磁路如图中虚线所示,沿程的四个气隙中通过的极化磁,通量相同。无电流信号时,衔铁由扭簧支承在上、下导磁架的中间位置,力矩马达无力矩输出。当有差动电流信号ΔI输入时,控制线圈产生控制磁通Φc。若控制磁场和永久磁铁的极化磁场方向如图所示,则气隙b、c中的控制磁通与极化磁通方向相同,而在气隙a、d中方向相反。因此气隙b、c中合成磁通大于a、d中的合成磁通,衔铁受到顺时针方向的磁力矩。当差动电流方向相反时,衔铁受到逆时针方向的磁力矩 动铁式力矩马达的线性度和稳定性受有效工作行程x与工作气 隙长度Lg之比值 数学模型:动铁式力矩马达动态传递函数的形式与式(4)相同,其中a稍有不同,即为 a=(Rc+Rp)/(2Lc) (5) |
它由永久磁铁1、衔铁2、导磁架3、控制线圈4、扭簧支座5等组成 动铁式力矩马达具有很高的工作频宽,但其线性范围较窄 |
|||
|
名称 |
结构原理图 |
工作原理 |
组成和优缺点 |
|||
|
压 电 晶 体 驱 动 式 |
|
把压电材料的电-机械转换特性引入到气动比例阀中,作为气动比例阀的电-机械转换级,这是一项不同于传统气动阀的全新技术。采用了压电技术的气动阀在性能上有着传统气动阀无可比拟的优势 其原理是利用晶体管的正压电效应:对于晶体构造中不存在对称中心的异极晶体,如加在晶体上的张紧力、压应力或切应力,除了产生相应的变形外,还将在晶体中诱发出介电极化或电场,这一现象被称为正压电效应;反之,若在这种晶体上加上电场,从而使该晶体产生电极化,则晶体也将同时出现应变或应力,这就是逆压电效应。两者通称为压电效应。利用逆压电效应原理,在晶体上给予一定的电压、电流,晶体也将按一定线性比例产生形变 如图j和图k所示的微型二位三通换向阀,1口为进气口,2口为输出口,3口为排气口,阀中间的弯曲部件为压电材料组成的压电片。当没有外加电场作用时,阀处于图j状态;进气口1关闭,输出口2经排气口3通大气。当在压电阀片上外加控制电场后,压电阀片产生变形上翘(见图k),上翘的压电阀片关闭了排口3,同时进气口1和输出口2连通,这样就完全实现了传统二位三通电磁换向阀的功能 |
||||
|
PWM高速脉冲先导控制式 |
|
PWM高速脉冲先导控制式利用PWM(Pulse Width Modulation)脉冲宽度调制技术,采用脉宽调制技术将输入的模拟信号经脉冲调制器调制成具有一定频率和一定幅值的脉冲信号,脉冲信号放大后,控制两个二位二通高速电磁换向阀。二位二通电磁阀的输出具有一定的压力和流量,以控制它的负载,可作为气动比例阀的可动部件驱动机构(电-机械转换器)功能,即气动比例阀的先导前置级(见图l)。同时,在PWM比例阀内设置了压力传感器,用来检测比例阀的输出压力。根据输出压力与输入信号压力的偏差进入PWM模块调节控制器,对两个二位二通电磁阀进行反馈,或对其进行进气补偿或排气释放,以达到所需要的平衡要求 |
||||