|
电液速度伺服系统的分析与校正 |
|||
|
(1)阀控电液速度伺服系统 |
|||
|
表1 |
|||
|
项目 |
分析 |
说明 |
|
|
方 块 图 |
|
(1)以阀控马达为例 (2)为突出本质问题,忽略放大器、伺服阀及检测环节动态 (3)图中: Ksv——以阀芯位移为输出的伺服阀增益,m/V Ke——放大器增益,V/V Kf——测速装置及速度传感器增益,V/(rad/s) |
|
|
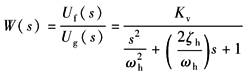
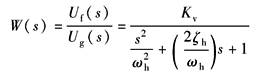
开环 传递 函数 |
Kv=KeKsvKfKq/Dm——开环增益 |
无积分环节,γ=0,为0型系统 开环传递函数为二阶的系统,理论上不存在稳定性问题。但由于穿越频率ωc处的斜率为-40dB/(°),且阻尼系数ζh较小,因此相角稳定裕量r(ωc)很小。若考虑伺服阀及检测环节所产生的相位滞后,即使开环增益Kv很小,甚至接近1时,系统仍有可能不稳定 解决稳定性问题的方法: (1)加滞后校正 (2)采用比例积分放大器 (3)采用开环控制 |
|
|
波 德 图 |
|
||
|
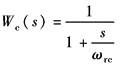
加 滞 后 校 正 |
在放大器之前加一RC滞后网络,其传递函数为:
|
|
ωrc=1/RC——滞后校正环节的转折频率,rad/s 加滞后校正后,系统稳定裕量增加了,但穿越频率大为减小了,即稳定性的提高以牺牲响应速度为代价 |
|
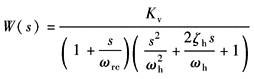
加滞后校正后的开环传递函数:
|
由波德图的几何关系可得ωrc=ωc/Kv Kv根据精度要求确定,ωc受ωh限制,取ωc=(0.2~0.4)ωh。当Kv、ωc确定之后,由ωrc便可确定RC网络参数 |
||
|
采 用 PI 放 大 器 |
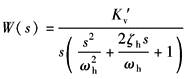
采用PI放大器时,开环传递函数及波德图:
|
K'v=KvK1 K1——PI放大器的增益 由波德图中几何关系不难求出:为达到与采用RC网络校正时所具有的相同穿越频率ωc,PI放大器的增益K1应为 K1=ωrc=ωc/Kv |
|
|
(2)泵控电液速度伺服系统 |
|||
|
表2 |
|||
|
方 块 图 |
以具备变量局部反馈的泵控马达为例 |
||
|
项目 |
分析 |
说明 |
|
|
开 环 传 递 函 数 及 简 化 |
(1)若ωsv?ωf ?ωh,可将变量位置局部闭环传递函数简化成
ωx=KiKsvKfx/Af ——变量位置环的转折频率 (2)设法使ωx?ωh,可进一步简化为
(3)在ωsv?ωf ?ωh及ωx?ωh条件下,开环传递函数可简化为
Kv=KuKf KpnpKf/KfxD2m——开环增益 |
(1)变量位置反馈后,变量缸原有的积分特性不存在了 (2)不能从式ωx=KiKsvKfx/Af 中认为:可以通过减小变量缸面积Af 来增大ωx,因为减小Af 将导致ωf 的降低,不能达到ωf ?ωh进行传递函数简化的条件 (3)与阀控速度伺服系统一样,泵控系统亦为0型系统,也必须采用PI放大器 |
|