|
电液位置伺服系统的分析及计算 |
|||||
|
误差 类型 |
分析及计算 |
说明 |
|||
|
指令 输入 引起 的稳 态误 差 |
输入信号 r(t) |
阶跃输入 r(t)=A·1(t) |
等速输入 r(t)=Bt |
等加速输入 r(t)=(1/2)ct2 |
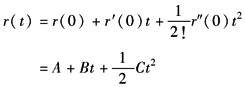
(1)液压位置伺服系统属1型系统,r=1 (2)对任意输入信号r(t)在t=0附近展成台劳级数,取前三项有
即任意输入信号可看成是阶跃、等速和等加速输入的合成。与此相应,总的稳态误差为稳态位置误差、速度误差和加速度误差之和 |
|
误差系数 |
稳态位置 误差系数 Kp=∞ |
稳态速度 误差系数 KV=Kv |
稳态加速度 误差系数 Ka=0 |
||
|
稳态误差 er(∞) |
稳态位置误差 erp(∞)= A/(1+Kp) |
稳态速度误差 erv(∞)= B/KV |
稳态加速度误差
|
||
|
负载 扰动 输入 引起 的稳 态误 差 |
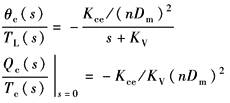
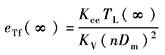
由静态方块图可得
负号表示负载增大时位移减小
|
以负载扰动为输入的静态方块图 |
|||
|
零漂 死区 引起 的稳 态 误差 |
|
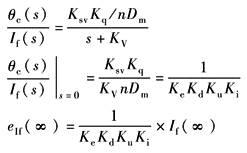
通常将放大器及伺服阀零漂、伺服阀死区、执行机构的静摩擦力等因素的影响,折算到伺服阀的输入端,以零漂电流If来表示,其静态方块图为
|
|||
|
检测 环节 引起 的稳 态 误差 |
检测装置及传感器的误差将直接传给系统 |
edu(∞)——检测装置的稳态误差 eds(∞)——传感器的稳态误差 |
|||
|
总的 稳态 误差 |
|
|
|||