|
电液位置伺服系统的稳定性计算 |
||
|
类别 方法 |
条件 |
稳定性分析 |
|
简易 稳定 性判 据 |
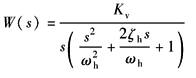
当ωi?ωsv?ωh,开环传递函数可简化成
|
应用劳斯稳定判据,可得电液位置伺服闭环系统的简易判据:Kv≤2ζhωh 考虑到ζhmin=0.1~0.2 得:Kv≈0.2~0.4ωh |
|
相 对 稳 定 性 判 据 |
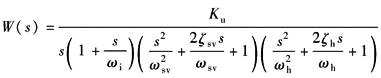
当ωi、ωsv、ωh值差别不是很大时,开环传递函数不能简化,即:
注意到液压位置伺服系统具有积分特性,因而仍存在ωc=Kv的情况 |
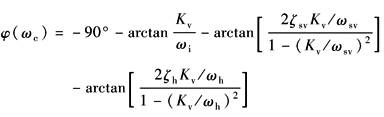
(1)已知ωi、ωsv、ωh及其阻尼值,并已确定开环增益Kv时,可由波德图中的相角稳定裕量γ(ωc)来评价系统的相对稳定性 一般要求γ(ωc)=30°~60°,具体值视系统要求而定 (2)已知ωi、ωsv、ωh及其阻尼值及要求的γ(ωc),则可由下式计算出允许的开环增益γ(ωc)=180°+φ(ωc)
|
|
动态 仿真 方法 |
当ωi、ωsv、ωh值差别不大,且ωh、ζh、Kv可能在较大范围内变化时 |
可应用面向动态方程、面向方块图、面向传递函数的仿真程序,进行系统的动态数字仿真,分析系统的稳定性、闭环响应及精度,并进行优化设计 |