|
工作原理与特点 |
|||||
|
谐波传动包括三个基本构件:柔轮1、刚轮2和波发生器3(图1)。三个构件中可以任意固定一个,其余两个一个固定,一个从动,可以实现 |
|||||
|
图1 谐波传动 1一柔轮:2--刚轮:3--波发生器 |
减速或增速(固定传动比),也可以换成两个输入、一个输出,组成差动传动。谐波传动减速器主要用于军工、精密仪器生产、医疗器械、起重机、船舶柴油机辅机、卷帘门、电动闸门的传动及机器人、天线的传动 柔轮轮体很薄,其上有特制的完整的齿圈(360°),轮齿模数较小,一般为0.2~1.5mm。波发生器的径向最大尺寸稍大于柔轮内孔直径,装配时把它放入柔轮内孔,使柔轮齿圈段变形成为椭圆形,并使椭圆长轴处A、B两点的轮齿与刚轮相啮合,而短轴处的轮齿脱开。若波发生器顺时针方向旋转,则柔轮1和刚轮2(固定轮)的啮合区也随着变化,轮齿依次进入啮合和脱离状态。柔轮的变形过程基本上是一个对称的谐波,因此称为谐波齿轮传动。对于双波传动其特点是发生器转一转,柔轮相对于刚轮在圆周方向转过两个齿距的弧长,它有两个啮合区。双波谐波齿轮传动变形时柔轮表面应力小,易获得大的传动比,结构较简单。对于三波传动则齿数差为3,有三个啮合区。三波传动其特点是作用于轴上的径向力小,内应力较平衡,精度较高,变形时柔轮表面应力较双波的大,而且结构较为复杂 |
||||
|
波发生器常有三种结构型式,如图2所示,但作用原理相同。为了减少波发生器对柔轮内表面产生过大摩擦,通常在波发生器上装弹性滚动轴承(图2e)。
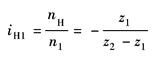
图2 波发生器 1一柔轮;2--刚轮;3--波发生器;4--压轮;5--轴承 因柔轮、刚轮齿数不等(通常柔轮比刚轮齿数少2齿),在传动过程中,若刚轮固定,波发生器为主动转动一圈时,柔轮只能相对刚轮向反方向位移。当波发生器以ωH方向转动至相当于柔轮一周的A1点(图2a)时,啮合经过z1个齿,波发生器继续转动至相当于刚轮2一周回到A点时,啮合经过的齿数为z2,此时柔轮1相对于刚轮2向ω1方向转动名。z2-z1个齿,显然传动比为
传动比与两个齿轮的齿数差成反比,而传动比与波发生器的波数无关。三个基本构件若固定其中任一构件,则传动比和转动方向也各不相同,见下表 谐波齿轮传动的特点如下 1) 结构简单,重量轻、体积小。由于谐波齿轮传动比普通齿轮传动的零件数目大大减少,其体积可比普通齿轮传动体积小20%~50% 2) 传动比范围大,一般单级谐波齿轮传动,传动比为60~500;当采用行星发生器时,传动比为150~4000;而采用复波传动时,传动比可达107 3) 承载能力高。由于谐波齿轮传动同时啮合齿数多,即同时承受载荷的齿数多,在材料的力学性能和传动比相同的情况下,齿的强度保持一定时,其承载能力比其他型式的传动大大地提高 4) 损耗小,效率高。这是因为齿的相对滑动速度极低。因此,它可在加工粗糙度和润滑条件差的情况下工作 |
|||||
|
序号 |
传动简图 |
固 定 件 |
主、从动件 的转向关系 |
传动比计算公式 |
|
|
1 |
|
刚轮 |
反向 |
|
|
|
2 |
|
柔轮 |
同向 |
|
|
|
3 |
|
波发生器 |
同向 |
|
|
|
5) 齿的磨损小且均匀。由于齿的啮合是面接触,啮合齿数多,齿面比压小,滑动速度低,所以对于齿的磨损小且均匀 6) 运动平稳,无冲击。由于柔轮与刚轮啮合时,齿与齿间均匀接触,同时齿的啮入和啮出是随柔轮的变形逐渐进入和退出刚轮齿间的 7) 可以向密封空间传递运动。由于弹性件(柔轮)被固定后,它既可以作为封闭传动的壳体,又可以产生弹性变形,即产生错齿运动,从而达到传递运动的目的。因此,它可用在操纵高温、高压的管道以及用来驱动工作在高真空、有原子辐射和有害介质空间的机构 在谐波齿轮传动中,柔轮加工较困难,对柔性轴承的材料及制造精度要求较高 |
|||||