|
用高副机构直接求解 |
|
平面高副机构的运动分析也可用封闭构件矢量法,对三构件单自由度平面高副机构,可写出图1所示的a、b、c三种模型,图a是两个运动构件以转动副与机架联接的,图b是运动构件1、2分别以转动副和移动副与机架联接的,图c是构件1、2均以移动副与机架联接。在接触点可写出它们的封闭构件矢量方程为: 图a、d、e: R1(u)=R2(υ)+a (式1a) 图b、f: R1(u)=S+e+R2(υ) (式1b) 图c: S1+R1(u)=S2+e+R2(υ) (式1c) 式中 R1(u)、R2(υ)—— 构件矢量; a—— 机架构件矢量(中心距); S、e—— 表达运动副相对位置的定向非构件矢量; u、υ——参变量
图1 与低副构件不同,高副构件的接触点是时变的,因而需要在运动构件上设置一个与构件固联的坐标系以代表高副构件运动转角φ的计量准线。但是高副元素的接触点在此坐标系中的位置也是时变的,它用参数u、υ来表达运动点在动坐标系中的相对运动。构件的运动则用转角φ或位移S来表达牵连运动。根据以上分析按(式1)利用坐标变换方法,可写成图1所示三种模型的投影标量表达式: 图1d,e: 图1f: 图1c: 式中 x、y;x1、y1;x2、y2—— 分别表示接触点M在机架坐标系和与运动构件固联的动坐标系中的坐标。φ角的度量方向与构件的转动方向相反,按右手法则确定其正、负号;ω1与ω2方向相同时,φ1与φ2同号,ω1与ω2方向相反时,φ1与φ2异号 (式2)只给出了联系四个未知变量u、υ、φ1、φ2的二个标量方程,因而是不可解的。为此,根据高副约束的特点,在接触点两高副元素的公切矢、公法矢应分别相等,且两者间的相对运动速度垂直于公法矢,因而可以补充一个约束方程,即
式中 nx、ny;nx1、ny1;nx2、ny2—— 高副元素接触点的公法矢分别在固定坐标系与动坐标系1和2中沿x、y方向的分量。对平面曲线有:nx1= (式2)和(式3)共给出了三个标量方程,联系着u、υ,φ1和φ2四个未知量,对单自由度机构通常φ1(或S1)是自变量,因而给定一个φ1值便可求得相应的φ2、u、υ值和φ2=φ2(φ1)的转角关系。通常联系着u、υ,φ1、φ2的三个纯量超越方程式,不易写出显式表达式,宜用数值计算法求解。通常由(式3)可以得到υ=f(u,φ2±φ1)的关系,将此关系代入(式2)所给出的二个投影方程式,它是φ1、φ*=φ2±φ1、u及定长参数的二个纯量方程,给定φ1便可求得u及φ*(或 φ2)。如定义��
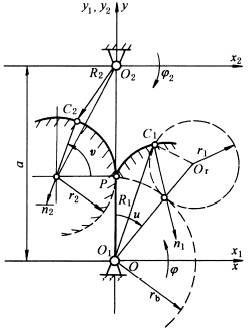
得到ω2=dφ2/dt=fω(φ1、ω1、u')的表达式。将υ=f(u,φ2±φ1)代入(式2)所得的二个投影式分别对φ1、t求二阶导数可分别得到i'21=di21/dφ1、u" 及ε2= 段曲线组成的,例如凸轮机构中凸轮廓线由停-推-停-回-停四段曲线组成,而瞬心线机构的构件廓线通常也是几段曲线组成的封闭或不封闭曲线,齿轮的廓线则是1~2段曲线组成的呈周期性排列的曲线,分析时并不需要分析整条曲线。为了说明方法如何应用,现举例如下 例 齿廓分别为外摆线和圆的齿轮1和2,各自绕固定中心O1、O2转动,中心距为a,在初始位置二者相切于点P(图2),已知轮1的角速度为ω1,角加速度为ε1,试求轮2的ω2和ε2 解:如令u、υ分别表示轮1、2的变量参数,rb、r1表示轮1的基圆半径和滚圆半径,且有r= r1 +rb、 的径矢和公法矢。
图2 将C1、C2及公法矢利用坐标变换(式2a)及(式3)变换到固定坐标系xOy中,由C1、C2上两点接触时在xOy中处于同一点并具有相同法矢,于是有:
式(h)是两齿廓上的点接触时应满足的条件,将式(h)代入式(e)、(f)后并对其施行坐标旋转后,可得:
给定φ1,由式(i)、(j)可求得φ*和u,则φ2=φ*+φ1、υ=-φ*-bu 将式(j)对φ1求导,并经化简得:
将式(h)对φ1求导可求变量参数υ对转角φ2的变化率为:
由式(k)、(l)可见
式中 x10、y10、x20、y20为曲线C1、C2经坐标变换到固定坐标系后的x、y分量,见式(e)、(f)。将
因此求得ω2=i21ω1 将式(m)对φ1求导得到传动比i21对转角φ1的变化率i21'
由于i21=ω2/ω1,可有
式中 i'21、i21分别由式(n)和式(m)确定,而ω1及ε1是原动件的给定运动参数 |